SONAR SYSTEM
One of the major focuses of the iBotics team
this year has been to develop a state-of-the-art passive sonar
processing and localization system. The sonar system will be implemented
for its first time at this year's competition. The iBotics team is
hopeful that the debut of this system will be impressive, but at the
same time the team is conscious that this sonar system will take much
more time to perfect.
Hydrophones
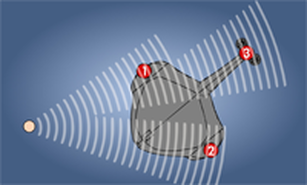
The sonar system relies on three channels of
recorded audio using Aquarian Audio H1a hydrophones. The hydrophones are
placed on each of the extremities of the Stingray: one under each of
the wings and one under the tail. The geometry of the hydrophones forms
roughly an isosceles triangle. For the nominal orientation of the sub,
the plane formed by the hydrophones is tilted approximately 10° downward
from the horizontal plane. This angle of difference between the two
planes is neither a strategic choice, nor a disadvantage to the system.
Each of the hydrophones is held in place by specially designed, 3-D printed holders that were designed and built by the iBotics team. Rather than mounting the hydrophones directly to the holder, the hydrophones are held snuggly in place by soft rubber vibration isolators. This reduces some of the unwanted vibration generated by the Stingray.
Each of the hydrophones is held in place by specially designed, 3-D printed holders that were designed and built by the iBotics team. Rather than mounting the hydrophones directly to the holder, the hydrophones are held snuggly in place by soft rubber vibration isolators. This reduces some of the unwanted vibration generated by the Stingray.
Custom Sonar Sampling & Processing Board
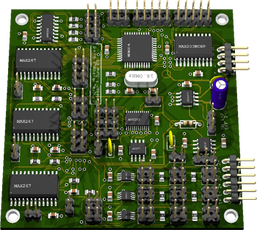
As the pinger signal is recorded by the three
hydrophone channels, the recorded data is fed into our custom sampling
and processing board designed and assembled by iBotics. There are two
main stages to the board: an all-digitally controlled analog
conditioning stage, and a digital sampling and processing stage.
The digitally controlled analog conditioning stage consists of a JFET input instrumentation amplifier, a MAX-267 pin-programmable switched capacitor band-pass filter, and an analog comparator with digitally programmable thresholds. With this configuration, not only is each of the analog conditioning parameters easily changeable to meet the specifics of the mission, but they can also be changed dynamically "on-the-fly" in order to adapt to less than ideal conditions. The end output at the analog comparators is a digitalized signal that indicates the time at which the sound from the pinger hit each of the hydrophones.
The digital sampling and processing stage consists of one key component: an Atmel ATMega32 AVR microcontroller. This component is responsible for regulating the analog conditioning stage, sampling the digital signal from the analog comparators, calculating the time difference of arrivals (TDOA's) of the pinger signal to each of the hydrophones, and communicating with the main computer on the Stingray via RS-232.
The digitally controlled analog conditioning stage consists of a JFET input instrumentation amplifier, a MAX-267 pin-programmable switched capacitor band-pass filter, and an analog comparator with digitally programmable thresholds. With this configuration, not only is each of the analog conditioning parameters easily changeable to meet the specifics of the mission, but they can also be changed dynamically "on-the-fly" in order to adapt to less than ideal conditions. The end output at the analog comparators is a digitalized signal that indicates the time at which the sound from the pinger hit each of the hydrophones.
The digital sampling and processing stage consists of one key component: an Atmel ATMega32 AVR microcontroller. This component is responsible for regulating the analog conditioning stage, sampling the digital signal from the analog comparators, calculating the time difference of arrivals (TDOA's) of the pinger signal to each of the hydrophones, and communicating with the main computer on the Stingray via RS-232.
Pinger Localization
The pinger localization algorithm takes place
on the main computer of the Stingray. The computer receives the TDOA's
from the sonar sampling and processing board and analyzes them to
determine the direction of and distance to the pinger. The pinger
localization algorithm is structured as a feed-forward neural network.
The implementation of the neural network is incredibly simple: given any
combination of TDOA's, the network can determine the relative bearing
to the pinger and the degree of inclination to the pinger with high
accuracy in just a few milliseconds. All the network requires is a set
of coefficients that represent the minimum-norm, least squares solution
of the relative position of the pinger given the TDOA's.
Although the implementation of the network is very fast and simple, the complexity lies in finding the necessary coefficients. To find these coefficients, the neural network must go through a training process. Given the specific geometry of the hydrophones, as well as other physical constraints, the neural network reiteratively finds the next best guess for the coefficient set, and slowly converges to the optimal solution. This process takes about 15 minutes to complete, but need not be performed on the Stingray's computer. Given that the geometry of the hydrophones, as well as the other natural constraints, remains the same, the network will not need retraining.
Although the implementation of the network is very fast and simple, the complexity lies in finding the necessary coefficients. To find these coefficients, the neural network must go through a training process. Given the specific geometry of the hydrophones, as well as other physical constraints, the neural network reiteratively finds the next best guess for the coefficient set, and slowly converges to the optimal solution. This process takes about 15 minutes to complete, but need not be performed on the Stingray's computer. Given that the geometry of the hydrophones, as well as the other natural constraints, remains the same, the network will not need retraining.
