SOFTWARE
The software that runs the Stingray 2.0 is derived from the same libraries developed for Stingray 1.0. It is designed in a hierarchical structure: several subsystems continuously perform their duties in the background, while a central planning node interfaces with each of the subsystems and sends them updated status and commands. A major modification has been our effort to modify it to comply with ROS (Robot Operating System) standards.
Central Planning Node: Planner
Computer vision subsystem: Vision
Control subsystem: Controls
Central Planning Node: Planner
Computer vision subsystem: Vision
Control subsystem: Controls
GUI & Tethered Operation
To aid in controls development, the iBotics team developed a GTK-based GUI application for use while tethered to the vehicle. The Stingray dock control station allows for real time planner task assignment, data-logging, controller gain tuning, actuator testing, vision tuning, and camera displays. The control station works in a client-server configuration with the Stingray, and all communication is done over standard TCP/IP connections.
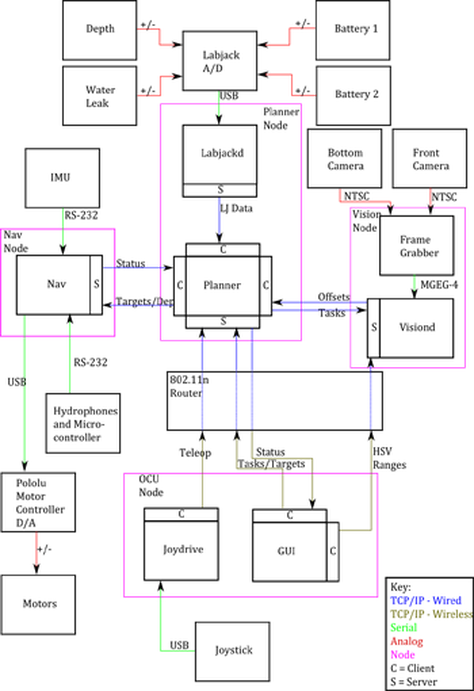
Operational Schematic